Вся электротехника России без посредников
Механические и электрические характеристики асинхронных электродвигателей
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных.
Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя.
Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.
Механические характеристики электродвигателей: 1 - абсолютно жесткая характеристика, 2 - жесткая характеристика, 3 - мягкая механическая характеристика
Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся.
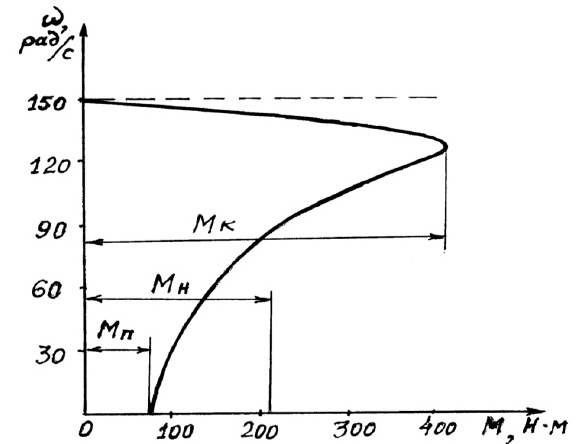
Естественная механическая характеристика асинхронного двигателя
Для примера рассмотрим АИР80В2У3.
Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.
Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.
Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.
Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Q = √(S2 - P2)
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √(30462 - 26502) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
Скорость вращательного движения на практике часто оценивается частотой вращения, то есть числом оборотов вала двигателя в минуту. Угловая скорость выражается в радианах в секунду (рад/с). Угловой скоростью удобнее пользоваться при выводе формул и проведении расчетов, частотой вращения - при практической оценке скоростных свойств двигателей.
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.
Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду.
Но поскольку двигатель асинхронный, то появление в обмотке ротора ЭДС и вращающего момента возможно только при наличии разности между скоростями магнитного поля и ротора. Это различие называют скольжением (s). Ротор вращается с отставанием на величину скольжения.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ((n – n1)/n)*100%
Для нашего примера s = ((3000 – 2870)/3000)*100% = 4,3%.
Угловая скорость асинхронного двигателя
Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
v = ωR
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
P = ωМ
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
М = FR
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.
Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Андрей Повный
Источник: http://electrik.info
Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя.
Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.
Механические характеристики электродвигателей: 1 - абсолютно жесткая характеристика, 2 - жесткая характеристика, 3 - мягкая механическая характеристика
Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся.
Естественная механическая характеристика асинхронного двигателя
Для примера рассмотрим АИР80В2У3.
Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.
Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.
Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.
Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Q = √(S2 - P2)
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √(30462 - 26502) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
Скорость вращательного движения на практике часто оценивается частотой вращения, то есть числом оборотов вала двигателя в минуту. Угловая скорость выражается в радианах в секунду (рад/с). Угловой скоростью удобнее пользоваться при выводе формул и проведении расчетов, частотой вращения - при практической оценке скоростных свойств двигателей.
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.
Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду.
Но поскольку двигатель асинхронный, то появление в обмотке ротора ЭДС и вращающего момента возможно только при наличии разности между скоростями магнитного поля и ротора. Это различие называют скольжением (s). Ротор вращается с отставанием на величину скольжения.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ((n – n1)/n)*100%
Для нашего примера s = ((3000 – 2870)/3000)*100% = 4,3%.
Угловая скорость асинхронного двигателя
Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
v = ωR
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
P = ωМ
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
М = FR
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.
Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Андрей Повный
Источник: http://electrik.info



