Вся электротехника России без посредников
Как устроен и работает сервопривод
Слаботочные сервоприводы под управлением ардуино (micro servo motor) широко применяются сегодня в любительской робототехнике, на их основе делают небольшие настольные станки и множество других интересных и полезных в хозяйстве вещей. Даже просто на уровне хобби такие сервоприводы находят массу разнообразных применений. Давайте посмотрим, что же такое сервопривод в простейшем виде, как он принципиально устроен и как работает.
Само слово «сервопривод» можно перевести как «следящий привод». То есть это такое приводящее устройство, которое содержит в себе двигатель, управляемый посредством отрицательной обратной связи, что позволяет осуществлять точные движения с выверенным позиционированием рабочего органа.
В принципе сервоприводом можно назвать электродвигатель, в системе управления которым имеется датчик положения рабочего устройства (или просто вала), текущие параметры с которого определяют то, как, куда и на сколько должен или не должен повернуться ротор мотора для получения нужного результата. Обычно в такой системе имеется блок управления приводом, который анализирует параметры с датчика, и в соответствии с ними управляет питанием двигателя.
Таким образом, сервопривод хотя и работает автоматически, процесс позиционирования рабочего органа оказывается при этом очень точным благодаря правильной обработке сигнала с датчика платой управления. Например целью управления может быть просто поддержание определенного значения конкретного параметра упомянутого датчика. Вот и становится понятно, почему привод называется следящим — он следит за состоянием датчика.
Двигатель с установленным редуктором может иметь всего три или четыре провода, идущих от него. По двум проводам подается питание на двигатель, с третьего — снимается сигнал от датчика, четвертый может быть предназначен для питания датчика.
Обычно провода питания имеют красный и черный или красный и коричневый цвета — это плюсовой и минусовой (земля) провода питания. Белый или желтый — сигнальный провод с датчика, через этот провод на плату управления приходит сигнал обратной связи о текущем состоянии системы.
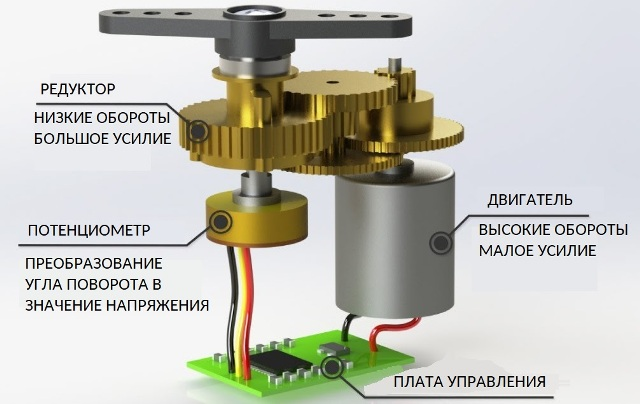
Простой сервопривод с редуктором (сервомашинка) и потенциометром — замечательный пример для того чтобы понять принцип работы обратной связи в системе управления сервоприводом.
Потенциометр имеет три вывода. На те выводы что по бокам — подается питание, а средний по сути — выход с резистивного делителя напряжения. Если изменить положение ручки потенциометра, то величина напряжения между минусом питания и средним его выводом измениться пропорционально изменению сопротивления между минусом и средним выводом.
Допустим, в крайнем левом положении напряжение на среднем выводе потенциометра будет минимальным, а в крайнем правом — максимальным. Получается что напряжение на среднем выводе потенциометра определяется положением его ручки, то есть тем, на какой угол она повернута от исходного положения, в котором напряжение на среднем выводе минимально. Обычно используют потенциометры с номинальным сопротивлением 5-10 кОм.
И как же здесь работает сервопривод? Ручка потенциометра в данном сервоприводе через редуктор соединена с валом двигателя. Значит, когда двигатель работает и его ротор вращается, ручка потенциометра поворачивается и следовательно сопротивление на среднем его выводе изменяется.
В крайнем левом положении, например, на среднем выводе будет 0 вольт, в среднем положении — 2,5 вольт, а в крайнем правом — 5 вольт. Для упрощения примем, что ручка потенциометра способна вращаться вокруг своей оси на 180 градусов, значит 2,5 вольта на среднем выводе будет соответствовать повороту ручки на 90 градусов.
Если плата управления получает информацию, что на среднем выводе 5 вольт, а необходимо создать поворот до 90 градусов, то к двигателю начнет автоматически подаваться питание определенной полярности до тех пор, пока он, поворачивая выход редуктора (а в месте с ним и ручку потенциометра) справа - налево, не доведет потенциометр до требуемого положения. Как только на среднем выводе потенциометра станет 2,5 вольт, двигатель прекратит получать питание от платы управления.
Аналогичным образом будет реализован поворот в другую сторону: если на среднем выводе 0 вольт, то полярность питания двигателя будет такой, что ручка потенциометра станет поворачиваться через редуктор слева — направо, пока напряжение не достигнет 2,5 вольт, соответствующих повороту ручки на 90 градусов. Это достаточно грубый пример, зато он достаточно нагляден.
Редуктор здесь необходим для того, чтобы высокие обороты вала маломощного мотора преобразовать в малые обороты с большим усилием, что позволит, во-первых, провернуть потенциометр, во-вторых, сделать это медленно и точно. Редуктор состоит из шестеренок, на валу двигателя находится маленькая, которая вращает большую, в центре которой маленькая и т. д.
Сервоприводы характеризуются несколькими главными параметрами. Первый главный параметр — усилие на валу (вращающий момент, деленный на ускорение свободного падения), которое измеряется у маленьких моделей в кг/см и определяется при номинальном напряжении питания мотора. Например, вращающий момент в 10 кг/см означает, что при расстоянии до оси выходного вала в 1 см, на нем можно удержать груз массой 10 кг.
Второй немаловажный параметр — скорость поворота, которая указывается в сек/60 градусов. Этот параметр показывает, сколько времени требуется сервоприводу для поворота его выходного вала на 60 градусов. Например 0,2сек/60 градусов. Далее идут такие параметры как напряжение питания, угол вращения (180 или 360 градусов) и тип редуктора (материал шестерней).
Андрей Повный
Особенности подключения устройств к Arduino
Управление двигателями и сервоприводами с помощью Ардуино
Что такое шим контроллер, как он устроен и работает, виды и схемы
10 интересных проектов для Arduino
Источник: http://electrik.info
Само слово «сервопривод» можно перевести как «следящий привод». То есть это такое приводящее устройство, которое содержит в себе двигатель, управляемый посредством отрицательной обратной связи, что позволяет осуществлять точные движения с выверенным позиционированием рабочего органа.
В принципе сервоприводом можно назвать электродвигатель, в системе управления которым имеется датчик положения рабочего устройства (или просто вала), текущие параметры с которого определяют то, как, куда и на сколько должен или не должен повернуться ротор мотора для получения нужного результата. Обычно в такой системе имеется блок управления приводом, который анализирует параметры с датчика, и в соответствии с ними управляет питанием двигателя.
Таким образом, сервопривод хотя и работает автоматически, процесс позиционирования рабочего органа оказывается при этом очень точным благодаря правильной обработке сигнала с датчика платой управления. Например целью управления может быть просто поддержание определенного значения конкретного параметра упомянутого датчика. Вот и становится понятно, почему привод называется следящим — он следит за состоянием датчика.
Двигатель с установленным редуктором может иметь всего три или четыре провода, идущих от него. По двум проводам подается питание на двигатель, с третьего — снимается сигнал от датчика, четвертый может быть предназначен для питания датчика.
Обычно провода питания имеют красный и черный или красный и коричневый цвета — это плюсовой и минусовой (земля) провода питания. Белый или желтый — сигнальный провод с датчика, через этот провод на плату управления приходит сигнал обратной связи о текущем состоянии системы.
Простой сервопривод с редуктором (сервомашинка) и потенциометром — замечательный пример для того чтобы понять принцип работы обратной связи в системе управления сервоприводом.
Потенциометр имеет три вывода. На те выводы что по бокам — подается питание, а средний по сути — выход с резистивного делителя напряжения. Если изменить положение ручки потенциометра, то величина напряжения между минусом питания и средним его выводом измениться пропорционально изменению сопротивления между минусом и средним выводом.
Допустим, в крайнем левом положении напряжение на среднем выводе потенциометра будет минимальным, а в крайнем правом — максимальным. Получается что напряжение на среднем выводе потенциометра определяется положением его ручки, то есть тем, на какой угол она повернута от исходного положения, в котором напряжение на среднем выводе минимально. Обычно используют потенциометры с номинальным сопротивлением 5-10 кОм.
И как же здесь работает сервопривод? Ручка потенциометра в данном сервоприводе через редуктор соединена с валом двигателя. Значит, когда двигатель работает и его ротор вращается, ручка потенциометра поворачивается и следовательно сопротивление на среднем его выводе изменяется.
В крайнем левом положении, например, на среднем выводе будет 0 вольт, в среднем положении — 2,5 вольт, а в крайнем правом — 5 вольт. Для упрощения примем, что ручка потенциометра способна вращаться вокруг своей оси на 180 градусов, значит 2,5 вольта на среднем выводе будет соответствовать повороту ручки на 90 градусов.
Если плата управления получает информацию, что на среднем выводе 5 вольт, а необходимо создать поворот до 90 градусов, то к двигателю начнет автоматически подаваться питание определенной полярности до тех пор, пока он, поворачивая выход редуктора (а в месте с ним и ручку потенциометра) справа - налево, не доведет потенциометр до требуемого положения. Как только на среднем выводе потенциометра станет 2,5 вольт, двигатель прекратит получать питание от платы управления.
Аналогичным образом будет реализован поворот в другую сторону: если на среднем выводе 0 вольт, то полярность питания двигателя будет такой, что ручка потенциометра станет поворачиваться через редуктор слева — направо, пока напряжение не достигнет 2,5 вольт, соответствующих повороту ручки на 90 градусов. Это достаточно грубый пример, зато он достаточно нагляден.
Редуктор здесь необходим для того, чтобы высокие обороты вала маломощного мотора преобразовать в малые обороты с большим усилием, что позволит, во-первых, провернуть потенциометр, во-вторых, сделать это медленно и точно. Редуктор состоит из шестеренок, на валу двигателя находится маленькая, которая вращает большую, в центре которой маленькая и т. д.
Сервоприводы характеризуются несколькими главными параметрами. Первый главный параметр — усилие на валу (вращающий момент, деленный на ускорение свободного падения), которое измеряется у маленьких моделей в кг/см и определяется при номинальном напряжении питания мотора. Например, вращающий момент в 10 кг/см означает, что при расстоянии до оси выходного вала в 1 см, на нем можно удержать груз массой 10 кг.
Второй немаловажный параметр — скорость поворота, которая указывается в сек/60 градусов. Этот параметр показывает, сколько времени требуется сервоприводу для поворота его выходного вала на 60 градусов. Например 0,2сек/60 градусов. Далее идут такие параметры как напряжение питания, угол вращения (180 или 360 градусов) и тип редуктора (материал шестерней).
Андрей Повный
Особенности подключения устройств к Arduino
Управление двигателями и сервоприводами с помощью Ардуино
Что такое шим контроллер, как он устроен и работает, виды и схемы
10 интересных проектов для Arduino
Источник: http://electrik.info



